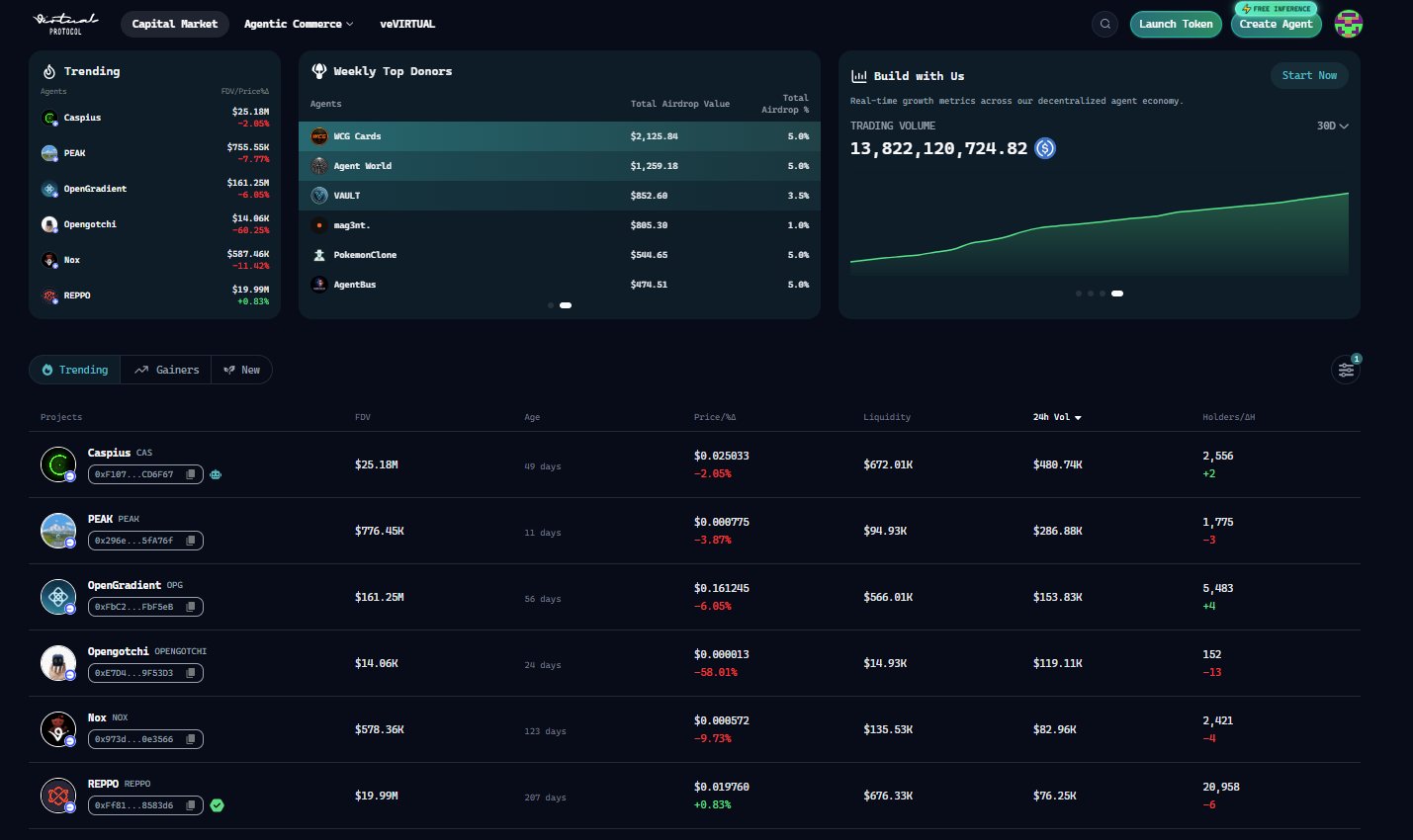
No launchpad/ launches at all on @virtuals_io - Something coming or just the UI playing tricks with no launches scheduled? https://t.co/aCSCpc7TFp




 13.7K @bigwil
13.7K @bigwil No launchpad/ launches at all on @virtuals_io - Something coming or just the UI playing tricks with no launches scheduled? https://t.co/aCSCpc7TFp
 55
55
 19
19
 11.8K
11.8K
 50.3K @yueya_eth
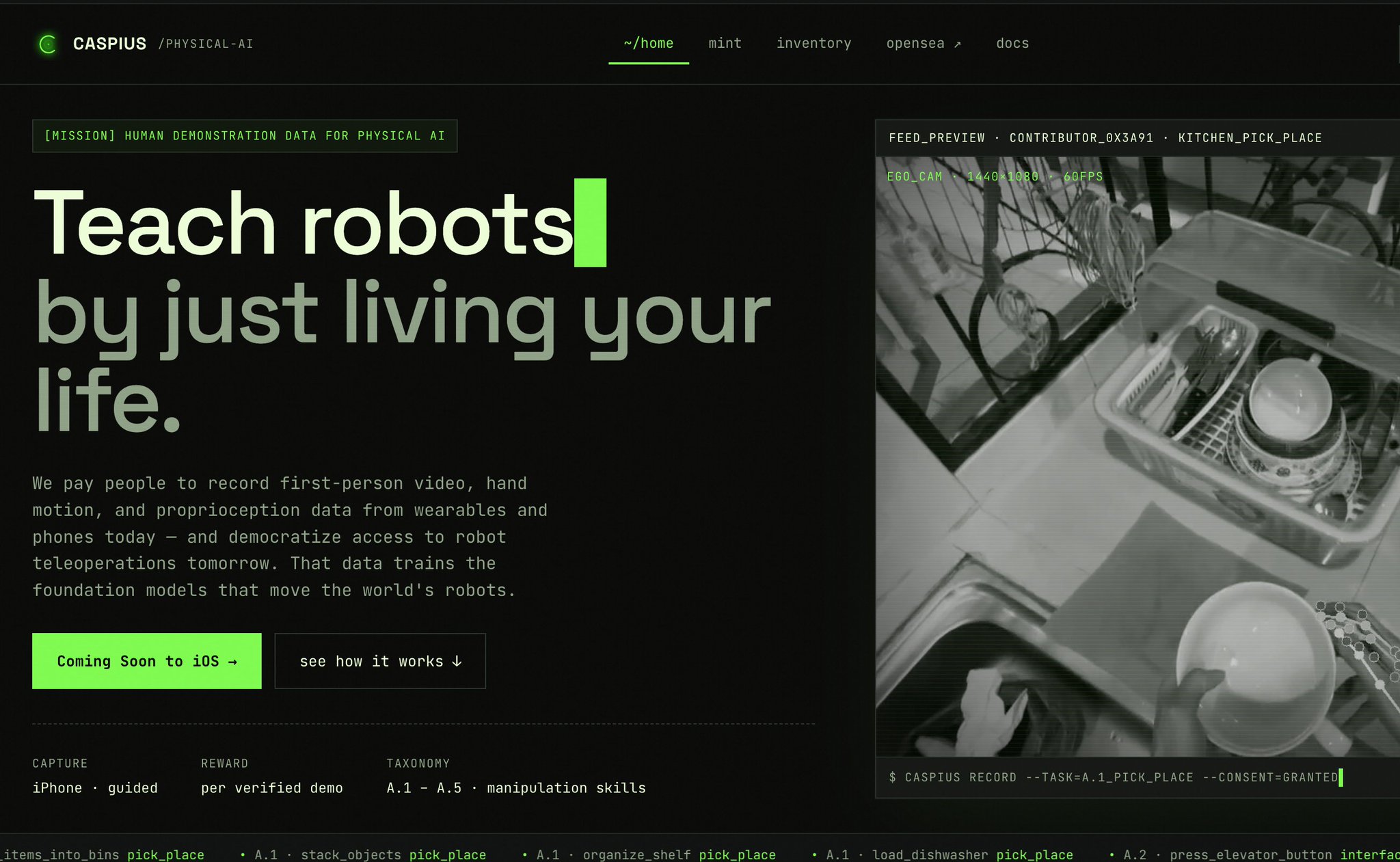
50.3K @yueya_eth Recently I started playing with @caspius_ai, let me explain its positioning:
It is the data layer for Embodied AI / Physical AI.
Large models can learn from internet text, but robots are different. Robots need to learn to cook, clean, do laundry, assemble, and transport, relying on vision, motion, hand‑eye coordination, object touch, and subtle changes in real environments.
These data are hard to solve with simulators.
What is truly scarce are massive first‑person task videos from the real world: different homes, objects, lighting, and people’s movement styles.
Caspius' approach is cutting‑edge:
An iOS app guides users to record first‑person daily task videos, keeping both hands in the center of the frame, completing cooking, cleaning, laundry, logistics, hardware assembly, and other real tasks; after verification they earn points, and NFT holders can later redeem $CAS.
It is a bit like the shadow of @Stepnofficial: turning ordinary people’s daily actions into data contributions that can be collected, verified, and incentivized by the network.
But this line is closer to RWA in the robot era.
Because these video data themselves are real‑world assets. They can be verified, priced, and directly used to train Vision‑Language‑Action models, bringing robots closer to generalized abilities in real environments.
Now teams such as Figure, Physical Intelligence, Scale AI, 1X, and Tesla Optimus are frantically supplementing real‑world data.
The reason is simple:
Whoever owns more high‑quality, diverse human‑task data is closer to the intelligence ceiling of a general robot.
I see Caspius, the core is whether it can expand “robot data collection” from labs and tele‑operation into a global crowdsourced data network.
If this flywheel gets going, users contribute real‑world data, models get training fuel, and the data’s value feeds back to contributors.
This could become a crucial layer of infrastructure for the Physical AI era.
50.3K @yueya_eth It's still super early, I've seen the ranking is under 50 people, join now to earn points and later have an advantage.
45
43
5.3K
50.3K @yueya_eth I highly appreciate @thedefiedge's overview of robotics × crypto on Base.
The project I currently favor the most is still $CAS (@caspius_ai).
The reason is simple:
Everyone is talking about AI agents, robots, physical AI, but what truly bottlenecks the industry is not the models, but "embodied AI data".
Robots need more than just being able to chat; they must know:
how to grasp objects,
how to move,
how to complete tasks in real environments.
These capabilities essentially require massive first-person human behavior data.
I think $CAS is special because it turns “ordinary people's daily actions” into structured training data.
Cooking, laundry, tidying up—once considered valueless—can now be recorded, labeled, trained, and monetized.
I also find the Genesis NFT design clever:
• NFT = data operator seat
• Different body parts + Traits determine specialization direction
• Rarity / Level / Trait match affect the multiplier
• Fabrication can continuously synthesize, breed, evolve “lineage”
Essentially, it’s gamifying the data network.
You are not just holding an NFT,
but participating in training the future robots’ “action database”.
The most critical point is:
Many robotics projects focus on the execution layer, coordination layer, payment rails.
But $CAS captures something deeper: data.
Once data forms a flywheel, the moat is often deeper than the protocol itself.
At least for now, it seems to be one of the few projects in robotics × crypto that feels “on the right track”.
 302.4K @thedefiedge
302.4K @thedefiedge The robotics x crypto narrative is quietly getting built on Base.
Not the robots themselves. The rails around them: data, ownership, payments, identity, teleoperation, and deployment.
If robotics scales, that's where the value accrues.
Here are some projects on my watchlist:
• @virtuals_io ($VIRTUAL): Virtuals is becoming the main launchpad for robotics on Base. The key piece is Eastworld Labs, a robotics track focused on humanoid fleets, teleoperation data, and physical-world task experiments. Their ecosystem already has 30+ Unitree robots and a robotics market cap around $45M.
• @caspius_ai ($CAS): Caspius is focused on embodied AI data. Robots need real-world movement, perception, and environment data before they become useful. Their recent Genesis NFT drop is tied to this data network, with contributors helping build structured training data for physical AI.
• @StrikeRobot_ai ($SR): Strike is direct humanoid robotics exposure. The project focuses on industrial/security environments and has published
72
49
11.8K




















